Le 19 décembre 2022
Notre expert vous explique comment gérer les non-linéarités et les problèmes de convergence sur Abaqus.
Dans un premier temps, il faut savoir que les sources de non-linéarités sont les suivantes:
Pour ce qui est des non-linéarités de type conditions limites, cela dépend de ce que veut modéliser l’utilisateur. Bien souvent, la non-linéarité est présente à travers la définition de contact dans le modèle.
Abaqus possède 2 solveurs et donc 2 méthodes de résolution différentes :
Pour Rappel :
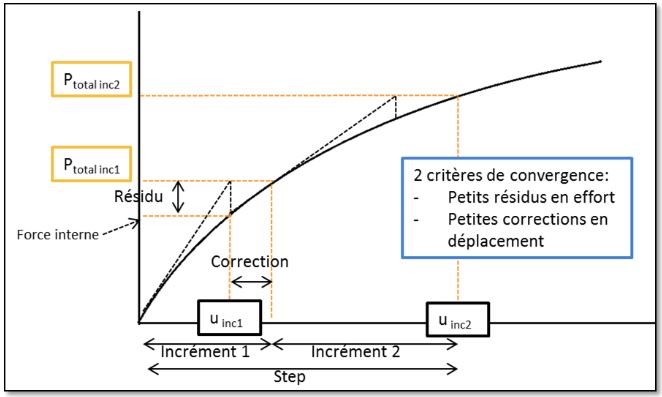
Les Analyses statiques non linéaires implicites sont résolues avec la Méthode de Newton-Raphson (Abaqus/Standard), méthode incrémentale itérative inconditionnellement stable.
Les étapes de chargements (steps) sont découpées en incréments (niveaux de charge donnés), dans lesquels nous retrouvons plusieurs itérations (tentatives de recherche d’équilibre). N’importe quelle taille d’incrément peut être utilisée.
Abaqus/Explicit résout l’équilibre dynamique en utilisant un schéma de résolution explicite, schéma conditionnellement stable (la taille du pas de temps doit être contrôlée). Nous faisons généralement beaucoup plus d’incréments mais ceux-ci sont moins couteux.
![]()
– Pas d’itérations
Ces messages apparaissent lorsque le volume sur un point d’intégration d’un élément devient négatif. Vérifiez les propriétés, les charges et les conditions aux limites; cela peut nécessiter plus de raffinement de maillage.
Relativement grandes déformations dans un problème dans lequel le modèle de matière est une forme de plasticité. Vérifiez le chargement (est-il excessif?), les données de matière et raffinement de maillage (grandes déformations?).
Déformations non physiques causées par l’utilisation des éléments d’intégration réduite de premier ordre. Si la rigidité de d’hourglass artificielle est trop élevée, affinez le maillage ou utilisez un type d’élément différent (premier ordre complétement intégré ou de second ordre).
Cela indique que des informations sont perdues lors de la résolution d’équations linéaires et que les résultats ne sont pas fiables. La cause la plus commune est un mode de corps rigide non contraint dans une analyse de contrainte statique.
Se produisent pendant la résolution d’équations linéaires quand il y a une force mais pas la rigidité correspondante. Les causes courantes sont des modes de corps rigides non-contraints et/ou des degrés de liberté sur contraints (ex : nœuds dans un collage et dans une autre condition limite).
Indiquent que la matrice de rigidité n’est pas définie positive. Par exemple, une charge de flambement a été dépassée.
Inscrivez-vous à nos Newsletters
En savoir plus sur
![]()